Co-Designing Programmable Fidgeting Experience with Swarm Robots for Adults with ADHD
Samira Pulatova, Lawrence H. Kim
Abstract
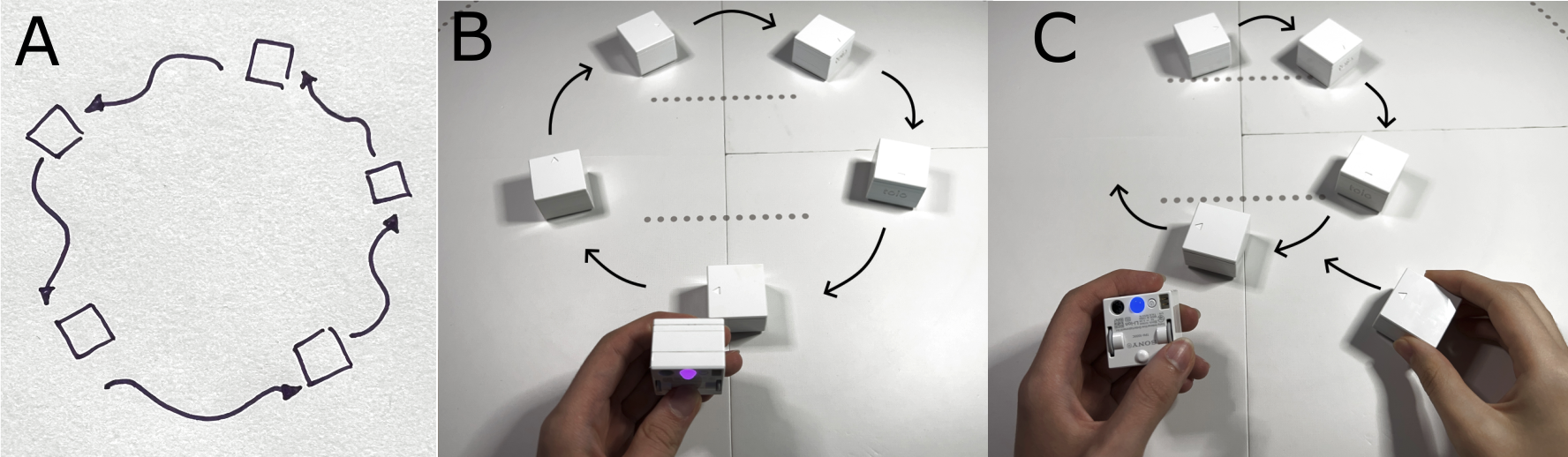
Individuals with ADHD grapple with elevated stress levels, emotional regulation challenges, and difficulty sustaining focus. Fidgeting, a behavior traditionally frowned upon, has been shown to help people with ADHD in concentration, emotional and mental state management, and energy regulation. However, traditional fidgeting devices have limited fixed affordances providing cookie-cutter style fidgeting experience to all despite individual differences. Recognizing the uniqueness of individual fidgeting tendencies, we use small tabletop robots to provide a customizable fidgeting interaction experience and conduct co-design sessions with 16 adults diagnosed with ADHD to explore how they envision their fidgeting interactions being changed with these programmable robots. We examine core elements defining a successful fidgeting interaction with robots, assess the significance of customizability in these interactions and any common trends among participants, and investigate additional advantages that interactions with robots may offer. This research reveals nuanced preferences of adults with ADHD concerning robot-assisted fidgeting.
Paper
Co-Designing Programmable Fidgeting Experience with Swarm Robots for Adults with ADHD [PDF]
Samira Pulatova, Lawrence H. Kim
ASSETS 2024