The Haunted Desk: Exploring Non-Volitional Behavior Change with Everyday Robotics
Lawrence H. Kim, Annel Amelia Leon, Ganapathy Sankararaman, Blake M. Jones, Gourab Saha, Amanda Spyropolous, Akshara Motani, Matthew Louis Mauriello, Pablo E. Paredes
Abstract
We introduce and explore the concept of non-volitional behavior change, a novel category of behavior change interventions, and apply it in the context of promoting healthy behaviors through an automated sit-stand desk. While routine use of sit-stand desks can increase health outcomes, compliance decreases quickly and behavioral nudges tend to be dismissed. To address this issue, we introduce robotic furniture that moves on its own to promote healthy movement. In an in-person preliminary study, we explored users’ impressions of an autonomous sit-stand desk prototype that changes position at regular pre-set time intervals while participants complete multiple tasks. While in-the-moment self-reported ratings were similar between the autonomous and manual desks, we observed several bi-modal distributions in user’s retrospective comparisons and their qualitative responses. Findings suggest about half were receptive to using an autonomous sit-stand desk, while the remaining preferred to retain some level of control.
Non-Volitional Behavior Change
We introduce the concept of non-volitional behavior change which we defne as a infrastructure-mediated intervention to enforce a change in behavior such as activity and posture. In a broader context, it can be defned as a compulsory change in behavior in response to a change in the environment.
The Haunted Desk is an instance of creating non-volitional behavior change using robotic technology to provide health benefts that mitigate the dangers of prolonged sedentary behaviors, which are associated with poor overall health [14]. In theory, even conventional sit-stand desks help to facilitate reductions in sedentary time and potentially mitigate health risk factors [8]. However, about one-third of sit-stand desk owners use the sit-stand functionality less than once a month [15]. An online survey of 1098 owners found that the reason users did not use this functionality was that they simply “do not bother” to do so, despite awareness of the health implications with sitting too long [21] and a desire for a healthier lifestyle [3]. To increase adherence to consistent use of sit-stand desks, we propose the Haunted Desk that automatically controls the transitions between sitting and standing, alleviating users from the burden of decision making while promoting healthy movements across the workday
Autonomous Sit-Stand Desk Design
Our fnal prototype (Figure below) is composed of: an electric height adjustable desk (Conset 501-27), an ultrasonic distance sensor (HCSR04) to control the height of the desk and prevent pinching, a thermal camera (MLX90640 55O) to detect presence of the user, and a microprocessor (Arduino Nano) to manage all of the above components. The entire electric module costs approximately $80 (fabrication cost per single unit) which could be further reduced when mass-manufactured. To allow users to perform fne adjustments, there are two buttons (up and down) on the right side of the desk that come standard. However, we modifed interactions with these buttons such that a constant press of the button raises or lowers the desk until released while a rapid double press will raise or lower the desk to the preset standing or sitting height.

Preliminary In-Person Study
Method
To help understand the important aspects of non-volitional behavior change via an autonomous sit-stand desk, we conducted a preliminary in-person mixed methods within-subject study. After performing three diferent tasks and experiencing both the manual and autonomous desks in a counterbalanced order, participants described their reactions to using these desks and provided feedback on how the two conditions could be further improved as shown below.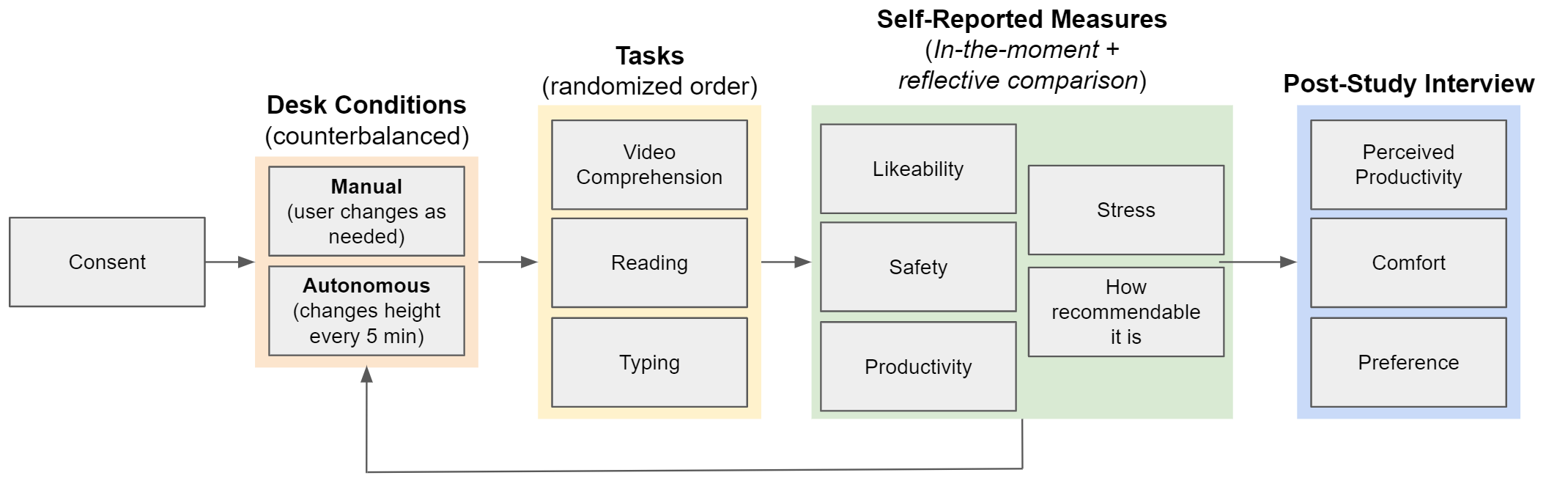
Results
Self-Reported Ratings
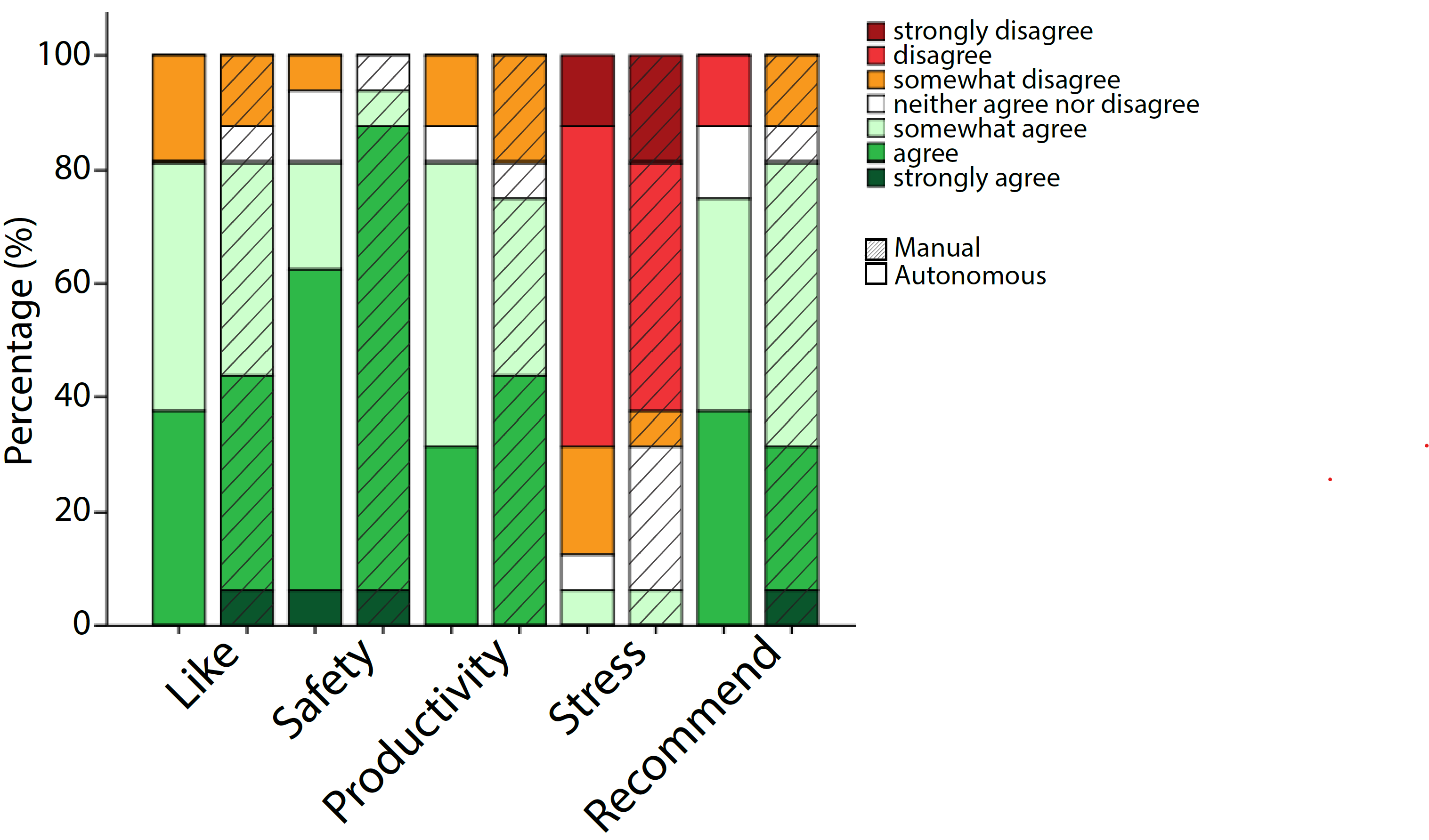
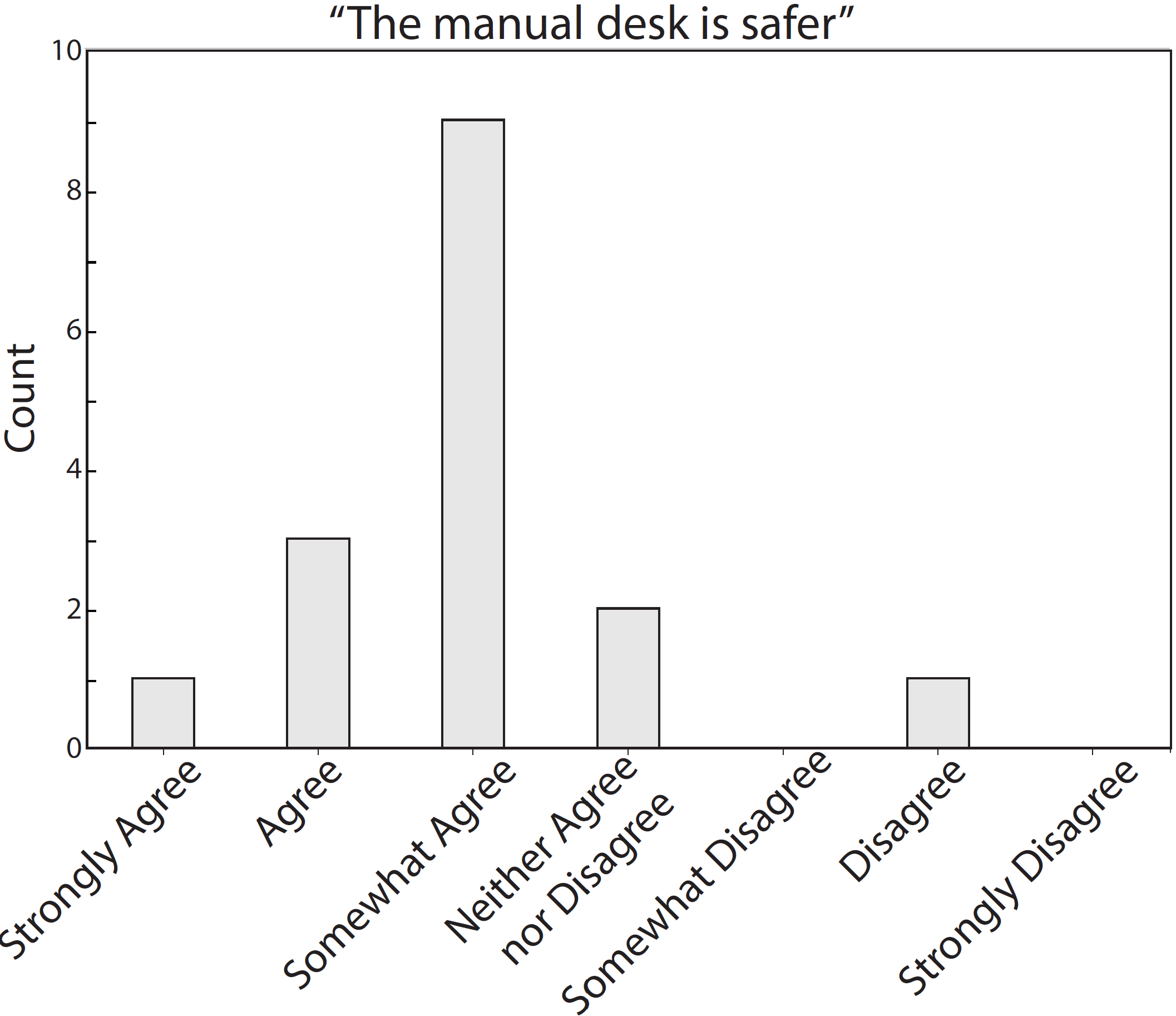
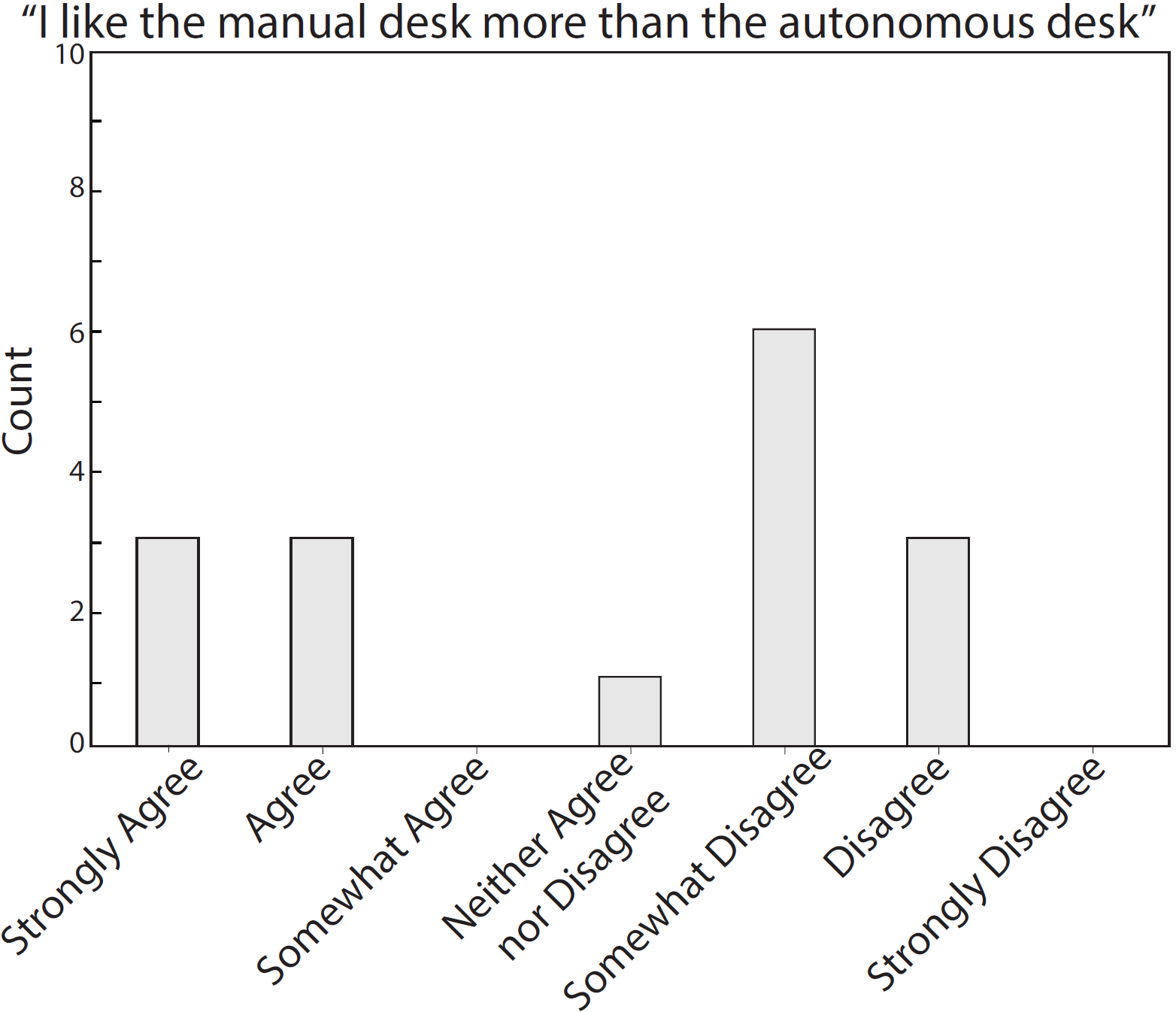
The autonomous and manual desks were rated similarly except for safety. The distributions of the in-the-moment ratings for both desks were also similar as shown below. However, when looking at post-study refective comparison ratings, we observed bi-modal distributions for some variables such as likeability, stress, and likelihood of recommendation to others, and uni-modal distributions for other variables such as safety and productivity as shown in Figures 4. This discrepancy between in-the-moment and post-study refective comparison ratings suggest that user’s experiential impressions and retrospective impressions may not always be aligned and warrant further investigation.
Qualitative Feedback
Participants were split in their preference for the manual and autonomous desks. About half of participants (9/16) preferred the autonomous desk because of its non-volitional height changes that forced them to alternate between sitting and standing as a means of benefting their health. For instance, P16 said that “... I know I need to get up and down, but it is so easy to forget. Being "forced" to do so is better for my health...” while P9 expressed a similar desire toward “wanting to move around to keep ft but I usually can’t do that. The automatic one forces me to move.” In terms of suggestions for improvement, seven participants wished there were a “snooze” feature such that they “could delay the desk moving if [they were] working on something important or on a video call” (P2), while three participants wished for a “more obvious notifcation before the desk moves up or down” (P7).
The remaining participants (7/16) preferred the manual desk over the autonomous one. Four desired having control over the desk
and two found the autonomous motion a source of disruption. For example, P5 mentioned that “I spend much of my day meeting with
people at my desk. Thus, I would prefer to have a desk that didn’t move independently...” while P13 found the automatic movement “jarring and distracting. It would be more productive for me to choose when to change the height”. In terms of suggestions for improvement, a few (4) mentioned that they wished the manual desk had a reminder feature. One desired having “a tone to remind me to move a little” (P1), while another wished there was “a timer that you can use to set your own automatic schedule” (P8).
Paper
The Haunted Desk: Exploring Non-Volitional Behavior Change with Everyday Robotics [PDF]
Lawrence H. Kim, Annel Amelia Leon, Ganapathy Sankararaman, Blake M. Jones, Gourab Saha, Amanda Spyropolous, Akshara Motani, Matthew Louis Mauriello, Pablo E. Paredes
Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI '21 Companion)