UbiSwarm: Ubiquitous Robotic Interfaces and Investigation of Abstract Motion as a Display
Lawrence H. Kim, Sean Follmer

Abstract
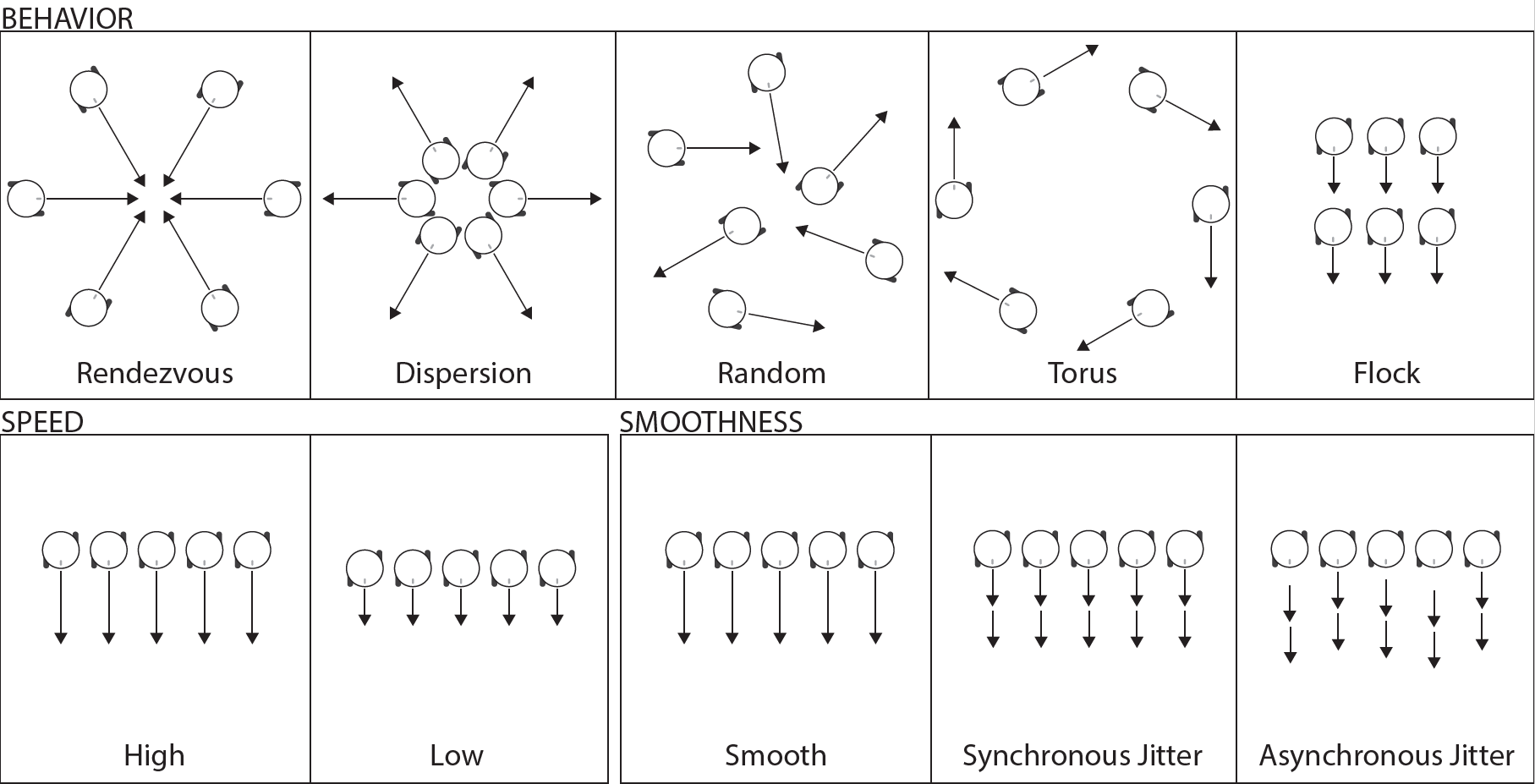
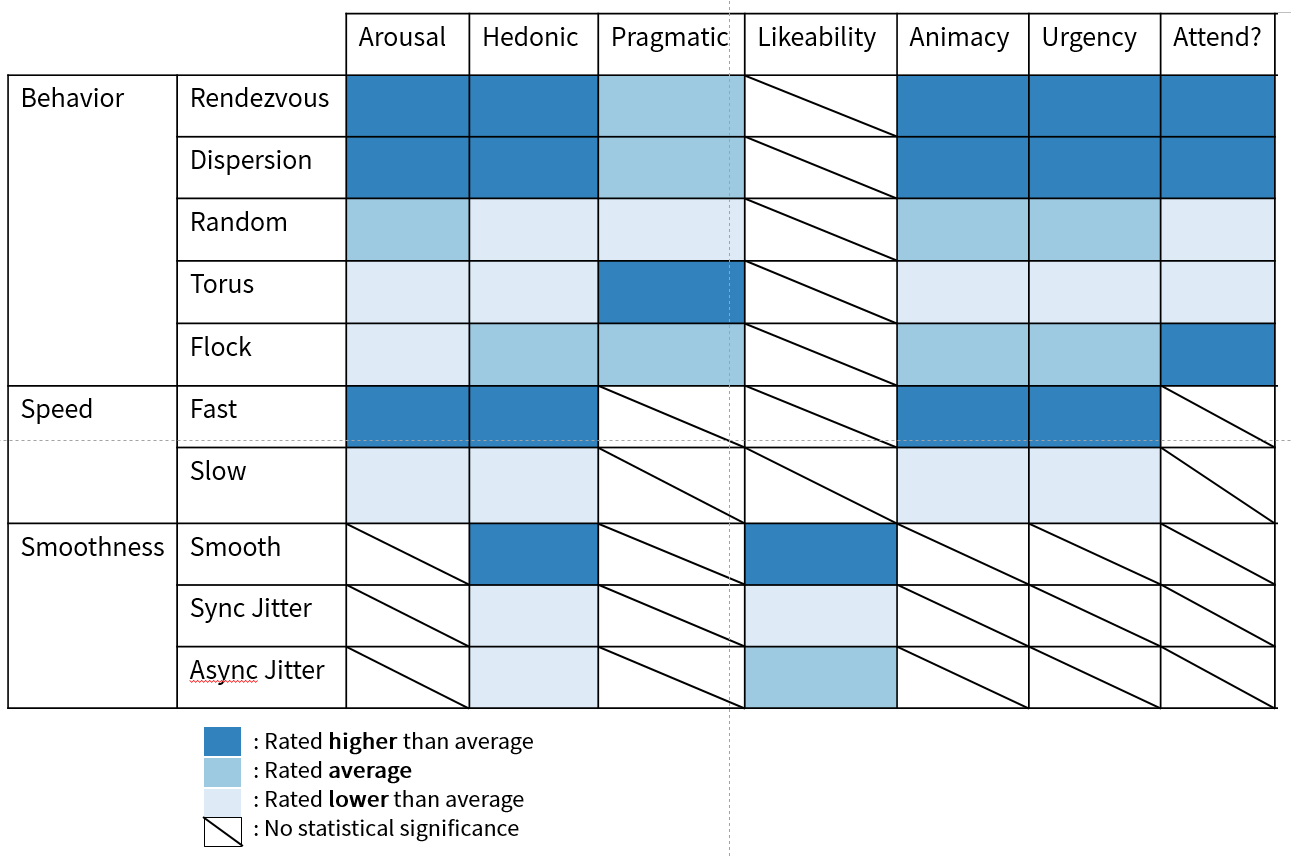
As robots increasingly enter our everyday life, we envision a future in which robots are ubiquitous and interact with both ourselves and our environments. This paper introduces the concept ofubiquitous robotic interfaces (URIs), multi-robot interfaces capable of mobility, manipulation, sensing, display and interaction. URIs interact directly with the user and indirectly through surrounding objects. A key aspect of URIs is their ability to display information to users either by collectively forming shapes or through their movements. In this paper, we focus on the use of URIs to display information in ubiquitous settings. We first investigate the use of abstract motion as a display for URIs by studying human perception of abstract multi-robot motion. With ten small robots, we produced 42 videos of bio-inspired abstract motion by varying three parameters (7 x 2 x 3): bio-inspired behavior, speed and smoothness. In a crowdsourced between-subjects study, 1067 subjects were recruited to watch the videos and describe their perception through Likert scales and free text. Study results suggest that different bio-inspired behaviors elicit significantly different responses in arousal, dominance, hedonic and pragmatic qualities, animacy, urgency and willingness to attend. On the other hand, speed significantly affects valence, arousal, hedonic quality, urgency and animacy while smoothness affects hedonic quality, animacy, attractivity and likeability. We discuss how these results inform URI designers to formulate appropriate motion for different interaction scenarios and use these results to derive our own example applications using our URI platform, UbiSwarm.
Video
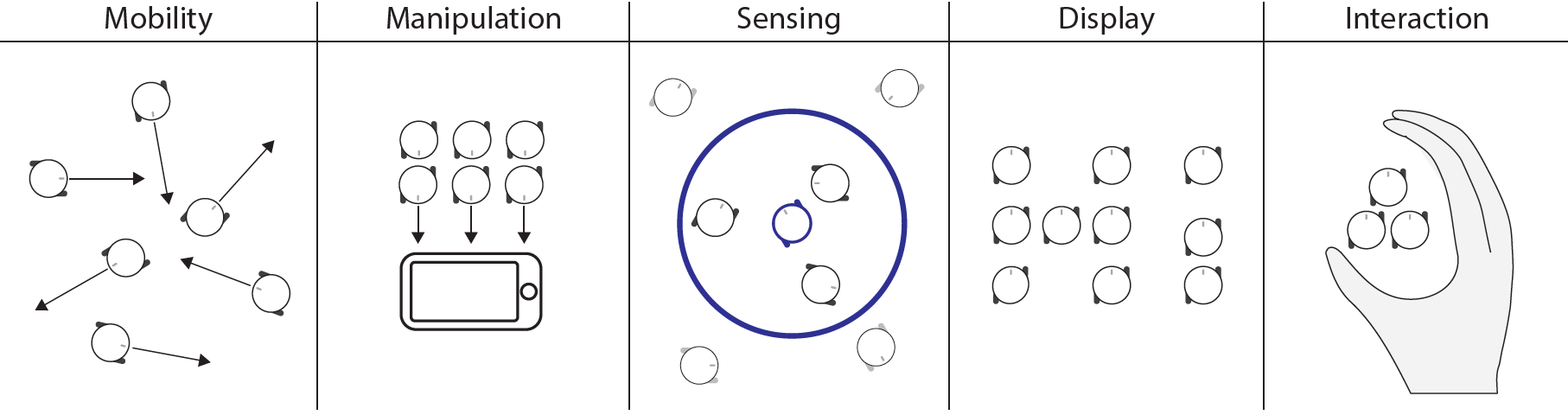
Ubiquitous Robotic Interfaces
Ubiquitous robotic interfaces (URIs) are composed of many robots and have the following key elements as shown below: Mobility, Manipulation, Sensing, Display and Interaction.
Investigation of Abstract Motion as a Display
For proper design of URIs, it is necessary to study how people interact and perceive them. In this paper, we first investigated how people perceive abstract multi-robot motion as a display. Through this study, we demonstrate that UbiSwarm, even with fixed form and no body or face, can elicit different perceptions including but not limited to affect and urgency through abstract multi-robot motion. This is done by varying a number of motion parameters: bio-inspired behavior, speed and smoothness. With the study results, we provide both design guidelines for abstract motion and example applications.
Multi-robot Abstract Motion Parameters
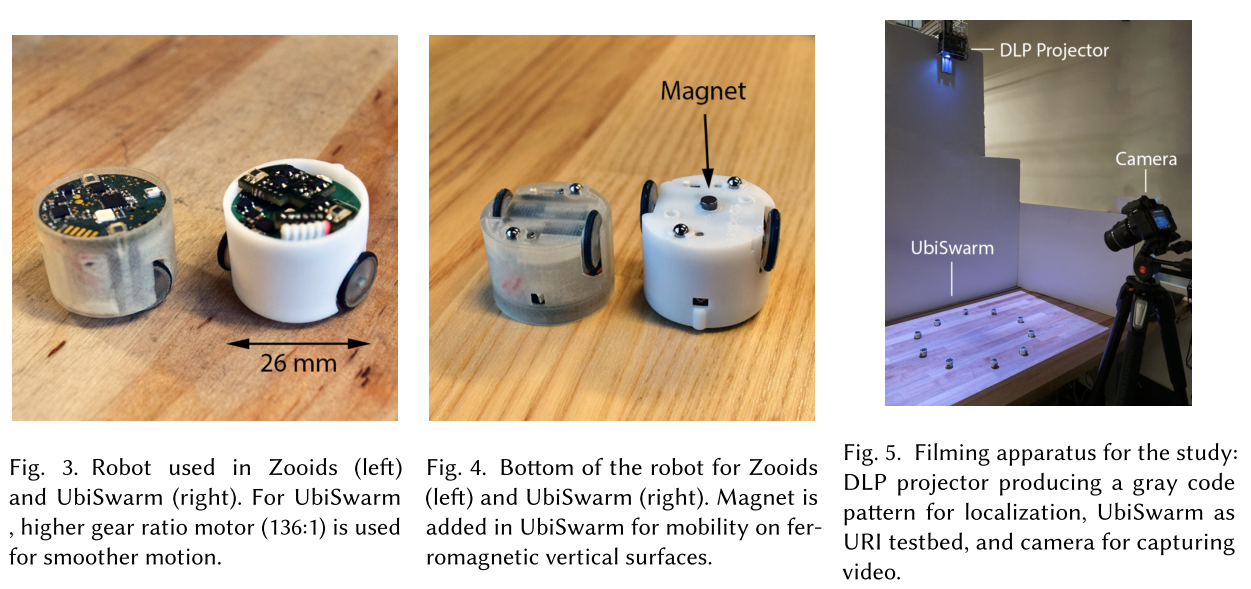
Setup
Results
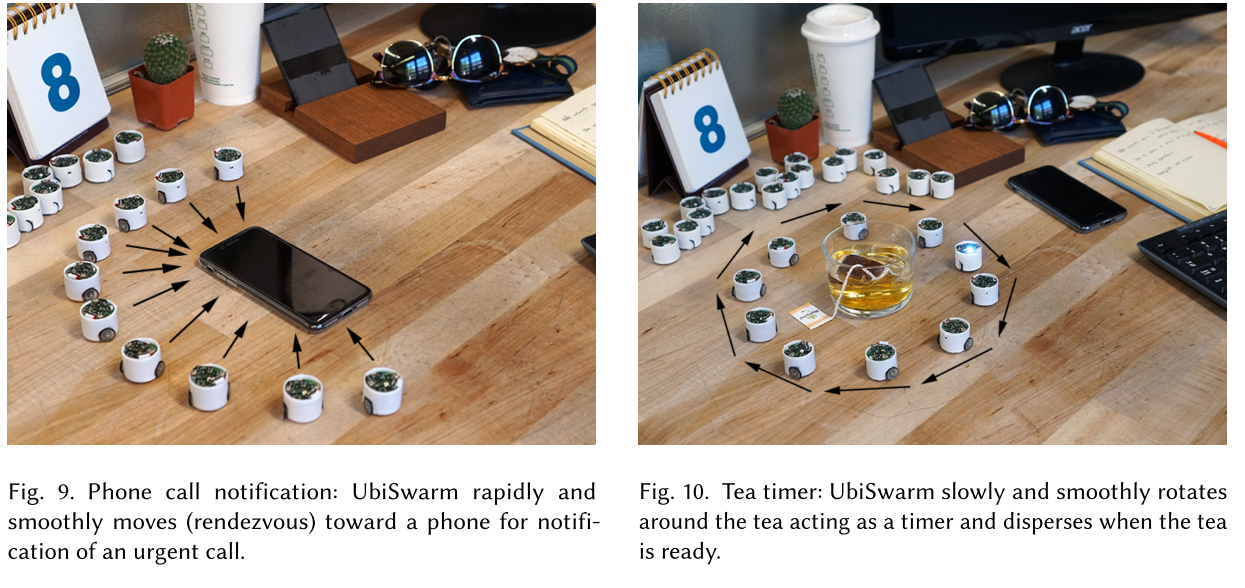
Example Applications
Paper
UbiSwarm: Ubiquitous Robotic Interfaces and Investigation of Abstract Motion as a Display [PDF]
Lawrence H. Kim, Sean Follmer
ACM Proceedings of the Interactive, Mobile, Wearable, and Ubiquitous Technologies (IMWUT)
Human Perception of Swarm Robot Motion [PDF]
Griffin Dietz, Jane L E, Peter Washington, Lawrence H. Kim, Sean Follmer
ACM Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems (CHI EA)