Effects of Master-Slave Tool Misalignment in a Teleoperated Surgical Robot
Lawrence H. Kim*, Clifford Bargar*, Yuhang Che*, and Allison M. Okamura
Abstract
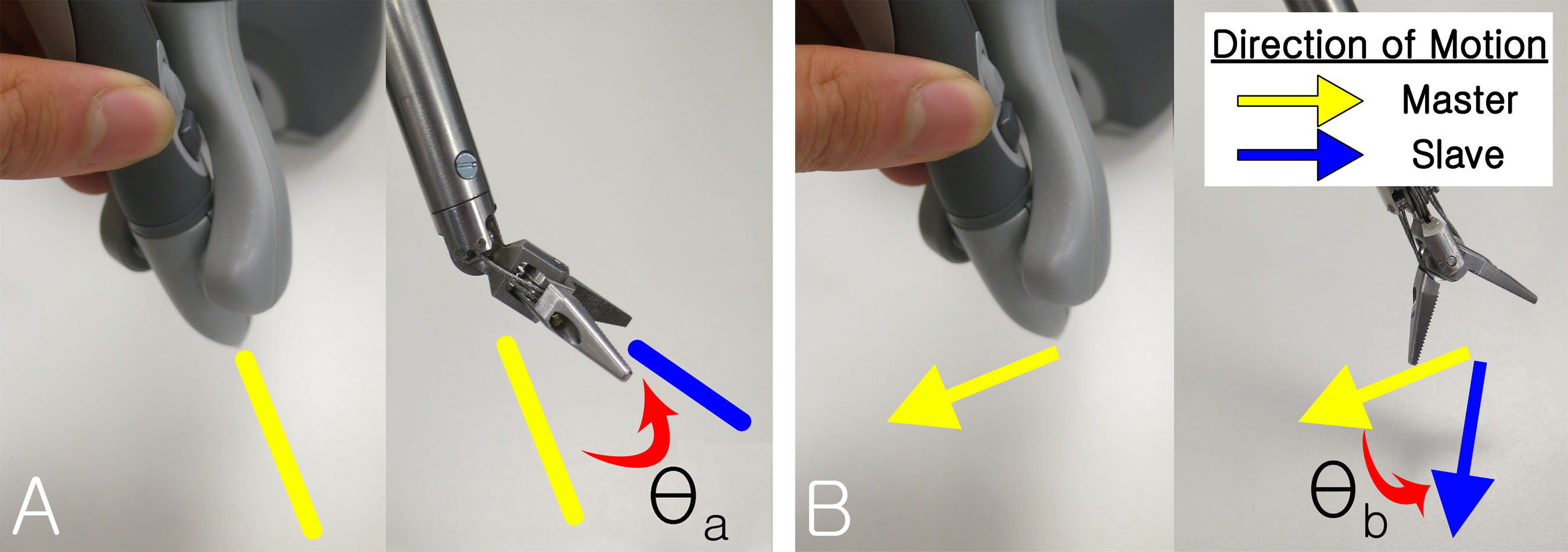
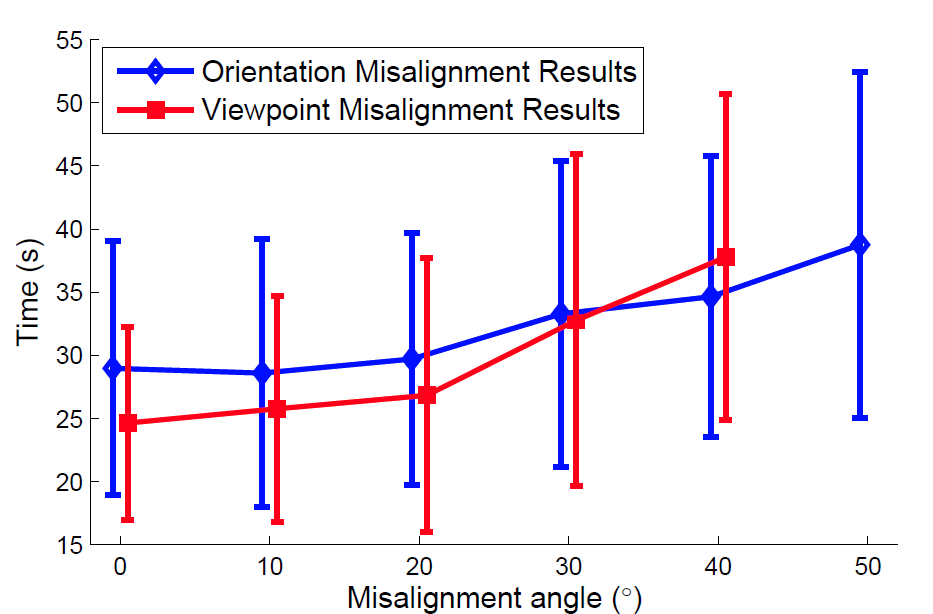
In a teleoperated system, misalignment between the master and slave manipulators can result from clutching, errors in the kinematic model, and/or sensor errors. This study examines the effects of type and magnitude of misalignment on the performance of the teleoperator. We first characterized the magnitude and direction of orientation misalignment created when clutching and unclutching during use of two surgical robots: the Raven II and the da Vinci Research Kit. We then purposely generated typical misalignments in order to measure the impact of such misalignment on user performance of a peg transfer task with the Raven II. Users were able to compensate for misalignment angles up to approximately 20 degrees in both tool orientation and camera viewpoint misalignment. These results can be used to guide the design and control of teleoperated systems for a variety of applications.
User Evaluation
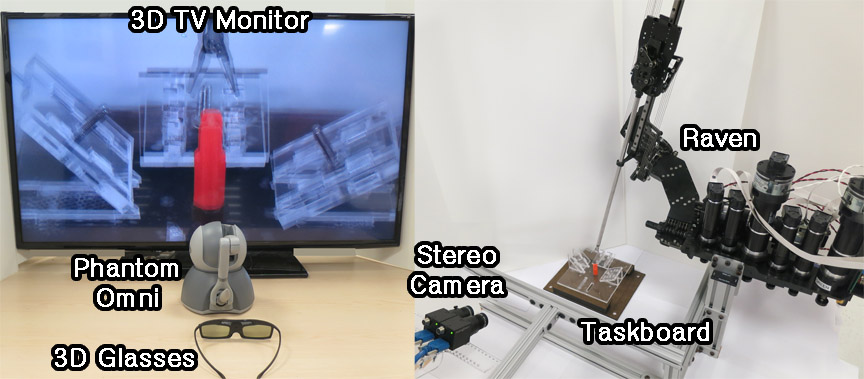
Setup
Participant used a 3D tv and OMNI phantom to teleoperate a surgical robot, Raven.
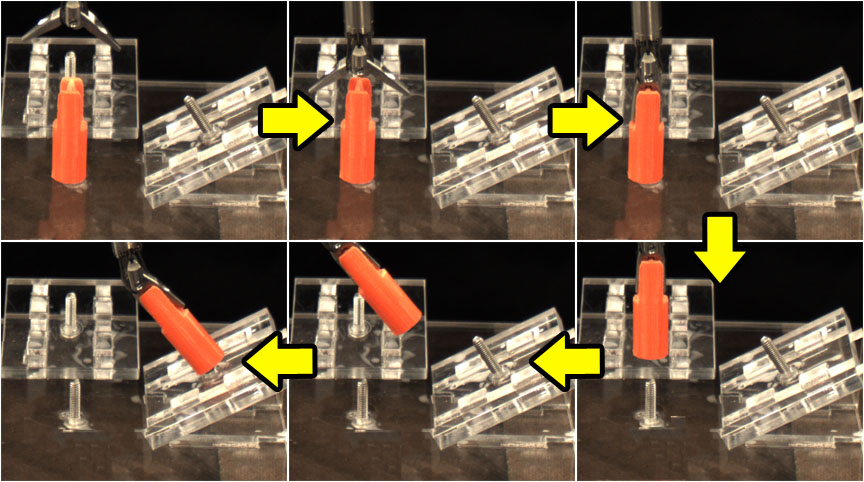
Task
Participants had to put a peg on the designated target.

Example Trajectory
Results
Paper
Effects of Master-Slave Tool Misalignment in a Teleoperated Surgical Robot [PDF]
Lawrence H. Kim*, Clifford Bargar*, Yuhang Che*, and Allison M. Okamura
IEEE 2015 International Conference on Robotics and Automation (ICRA)